



 [VIP第4年] 指数:1
[VIP第4年] 指数:1


配电房轨道巡检机器人沿着室内顶部铺设的轨道运行,可以在不占用地面空间的情况下,对配电房内设备进行全面巡检,利用滑线取电方式获取动力,无需额外布线。
轨道式巡检机器人,其行走方式采用轨道式移动机构,机器人本体利用滑线取电方式获取动力,通常在一个配电房中,其滑触线的距离为20~300米之内。采取PLC技术可以借助滑触线传输数据,无需额外布线,即可实现定位、高速运行,进而实现更多功能应用,能有效解决wifi信号延时大的问题,并且传输稳定,不会发生掉线等问题。
配电房轨道巡检机器人,采用滑触线供电方式,沿着室内顶部,铺设的轨道运行。无需占用地面空间,无需布线,能全面巡检配电房内设备,实现24小时不间断巡检,不受时间和地域限制

配电房轨道巡检机器人功能配置
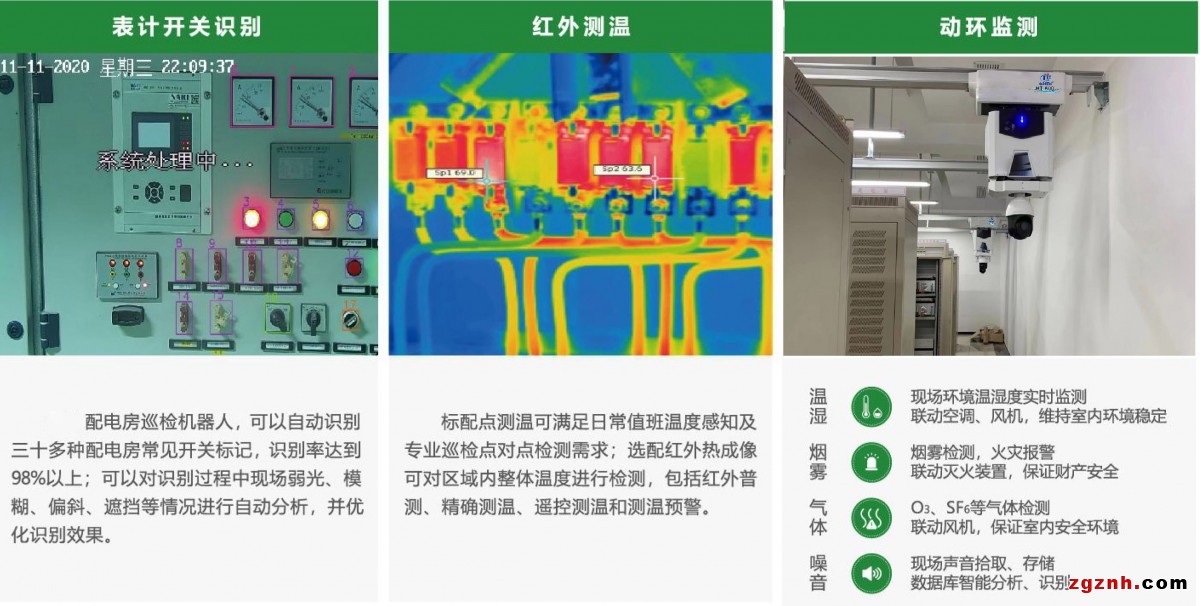
(1)视频识别。挂轨机器人视频识别是室内挂轨式巡检机器人系统的核心功能之一,通过机器人自身携带的可见光摄像机,完成视频图像的数据采集,通过高精度图像识别算法,对视频数据进行智能分析处理,识别视频内容。
(2)红外测温。挂轨机器人利用自身携带的红外热成像仪对室内电力设备温度数据进行采集、分析,进而诊断出致热型设备故障及热缺陷,触发相应报警。巡检任务执行完成后会自动生成任务报表,对设备温度进行有效的诊断。
(3)环境检测。挂轨机器人携带的环境监测模块,能够监测环境中的有害气体、温度、湿度、烟雾等环境信息。实时将采集的环境信息传输到控制中心,当监测到有害气体超标时,系统将进行报警,以提示运维人员及时处理。
(4)音频采集。挂轨机器人本体搭载高灵敏度的拾音器,并随云台一同转动,定向采集电力设备的音频信息。机器人采用国际领先的音频降噪算法和声音识别技术,增强音频信息识别的准确性和可靠性。音频数据经过软件压缩后传回服务器进行存储,可双向语音通话。
(5)任务管理。在监控平台中,将任务管理分成全面巡检、例行巡检、专项巡检、特殊巡检、自定义任务、地图选点以及任务展示7大模块,每个大模块又拆分为不同的小模块,可以根据各种情况建立不同类型的任务。在任务系统中既可以手动进行任务的执行,也可按照日程进行任务分配执行,实现自动巡检功能。

 粤公网安备 44030702001206号
粤公网安备 44030702001206号