

 [VIP第4年] 指数:1
[VIP第4年] 指数:1


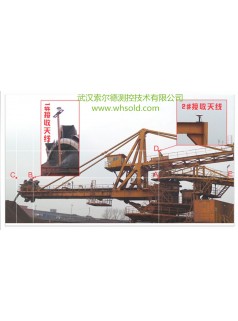
堆取料机GNSS精确位置检测系统采用在堆场合适位置建立基准站,在堆取料机的回转中心和悬臂中部或者头部中心点安装GPS流动站。通过GPS的位置信息和空间几何算法,得出两台堆取料机之间的小距离,从而可以判断出堆取料机发生碰撞的可能性,使得作业人员进行相应处理。本系统可以实时计算出堆取料机悬臂的相对位置和距离,实现多台堆取料机在同一个场垛中安全作业。该系统包括:基准站系统、流动站系统、监控软件系统。
堆取料机GNSS精确位置检测系统实现的功能效果
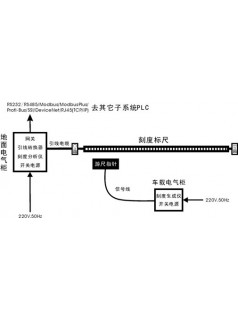
使用本系统后,进行数据采集和空间几何算法,再将计算结果传给PLC,进行大机精确位置检测和防碰撞控制的计算与报警,还可以检测悬臂旋转角度及俯仰角度,效果显著。不但解决了其它位移传感器检测大机位置不准确的问题,而且节省了检测悬臂旋转角度及俯仰角度的传感器,消除了数据检测中间转换的误差,提高了数据精准度。同时,计算过程简单、直观,可实现多台堆取料机同场同时作业,实时检测各个悬臂之间的小距离,防止发生碰撞,提高了安全性和作业效率,可用于多种类型的堆取料机,提高同场作业效率达到80%左右,可以实现无人操作。
堆取料机走行位置、装卸位置精确检测;
可实现堆取料机自动走行,自动堆取料;
实现位置联锁,可以防止两端掉道或碰撞事故;
与堆取料机小皮带联锁控制,防止混料、错料、堵料事故;
可进行鳞状堆积预混匀作业,以提高原料成分的均匀度、减少粒度偏析;
实现堆取料机远程监控功能;
结合皮带秤数据对堆场堆存量数字化管理;
严格控制堆料形状和取料规律,可以大大提高料场的存储容量,提高料场的利用率
变起点定终点工艺可将料堆截面堆成长方形,减少端部料的产生和浪费,也同时减少铲车进场的作业量。
 粤公网安备 44030702001206号
粤公网安备 44030702001206号