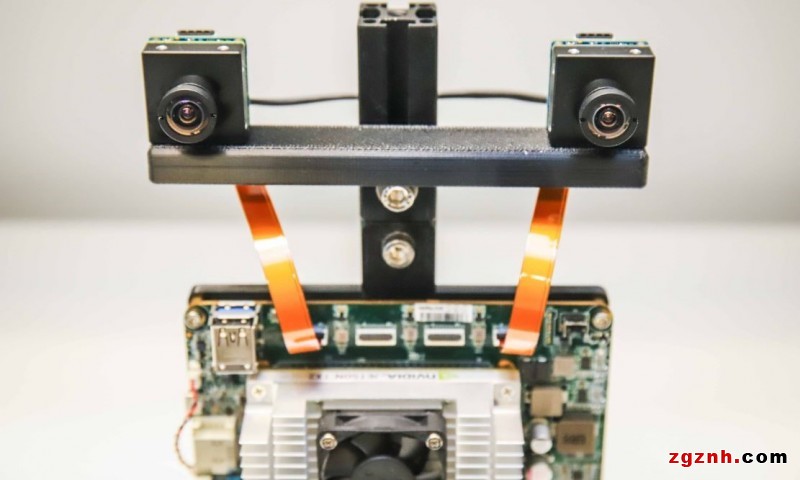
深度感知可通过多种 3D 传感器(从摄像头的立体视觉到激光雷达和 ToF 传感器)来实现,每个传感器各有优劣势。虽然有成品可选,不过定制嵌入式解决方案更能满足特定应用需求。我们的嵌入式深度感知解决方案通过摄像头的定制立体设置,打造高分辨率彩色点云。根据精度、基线、视场和分辨率等因素,使用相对实惠的组件和开源软件即可构建此类解决方案。
本文中,Teledyne FLIR 机器视觉工程师大致介绍了立体视觉,然后说明了自行设计深度感知解决方案的必要步骤。本文还介绍了在空间和计算要求方面 2 种设计选择的利弊:包括每个选项下构建、标定和实时映射的详细步骤。其设置在没有主机的情况下完成此内容,使用成品硬件与开源软件选项。继续阅读了解更多信息,本文内容有:
• 立体视觉系统简要概述
• 如何用机器视觉摄像头构建深度感知解决方案
• 不同空间和计算要求下的两种设计选项
• 包含样例代码的每个选项构建分步指导
• 构建系统所需的成品硬件和开源软件
• 校准和实时深度映射的步骤
• Spinnaker SDK 带来的独特功能和易于集成的特性