
将自动化技术应用于医疗检测,降低人工介入的感染风险
工艺介绍

当前,全球疫情的形势依然严峻,核酸检测成为了防止大范围传染的有效手段之一,也成为了我们生活的一种“常态”。
随着技术的不断革新,核酸检测从原本的手动提取,1小时仅能提取1个样本,且存在高危险性,升级为如今的核酸检测仪提取,能够1小时内提取96个样本,且无接触,安全性高,帮助更快、更高效的检出感染者,并加以控制。
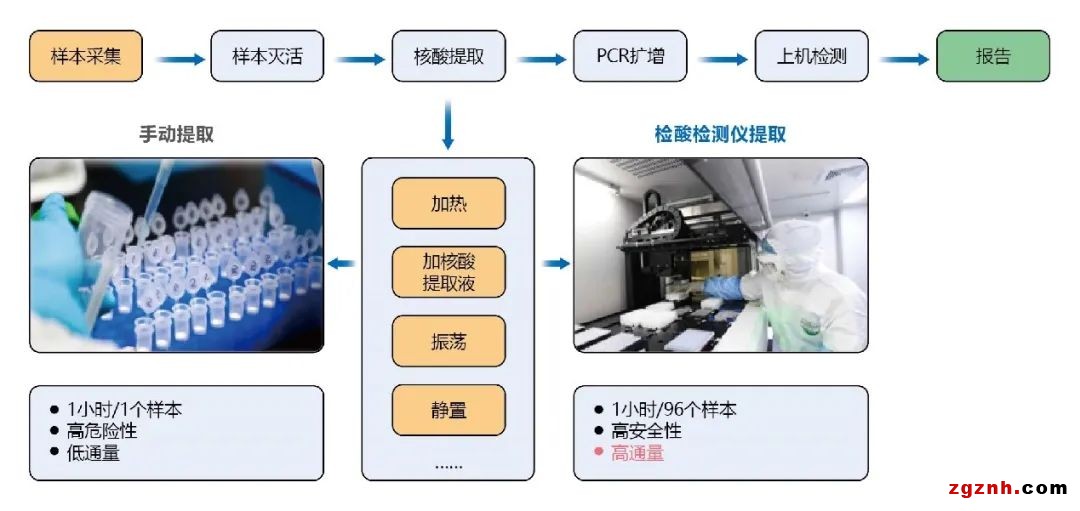
这类的核酸检测仪,称之为高通量核酸提取系统,即单次可同时完成几十甚至上百个样品的处理;并且整个搬运、取放流程无需人员介入,完全由机器人自主完成。
课题
1、 机器人如何实现柔性作业?
机器人移动至哪个位置?从哪个工位取料/放料?何时开始?以及,与上位系统如何建立通讯、数据如何交互处理?都是亟需解决的课题。
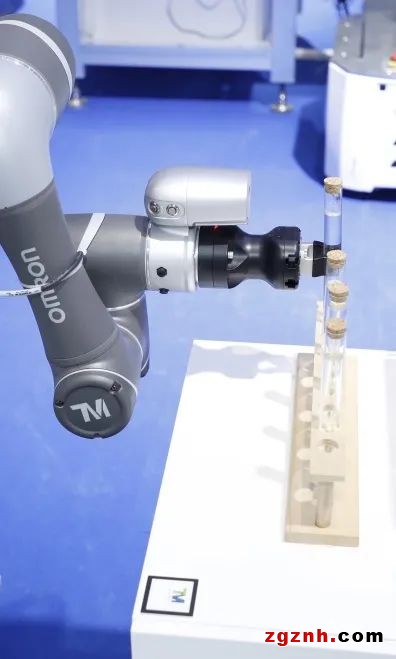
2、 机器人如何准确高效地取料/放料?
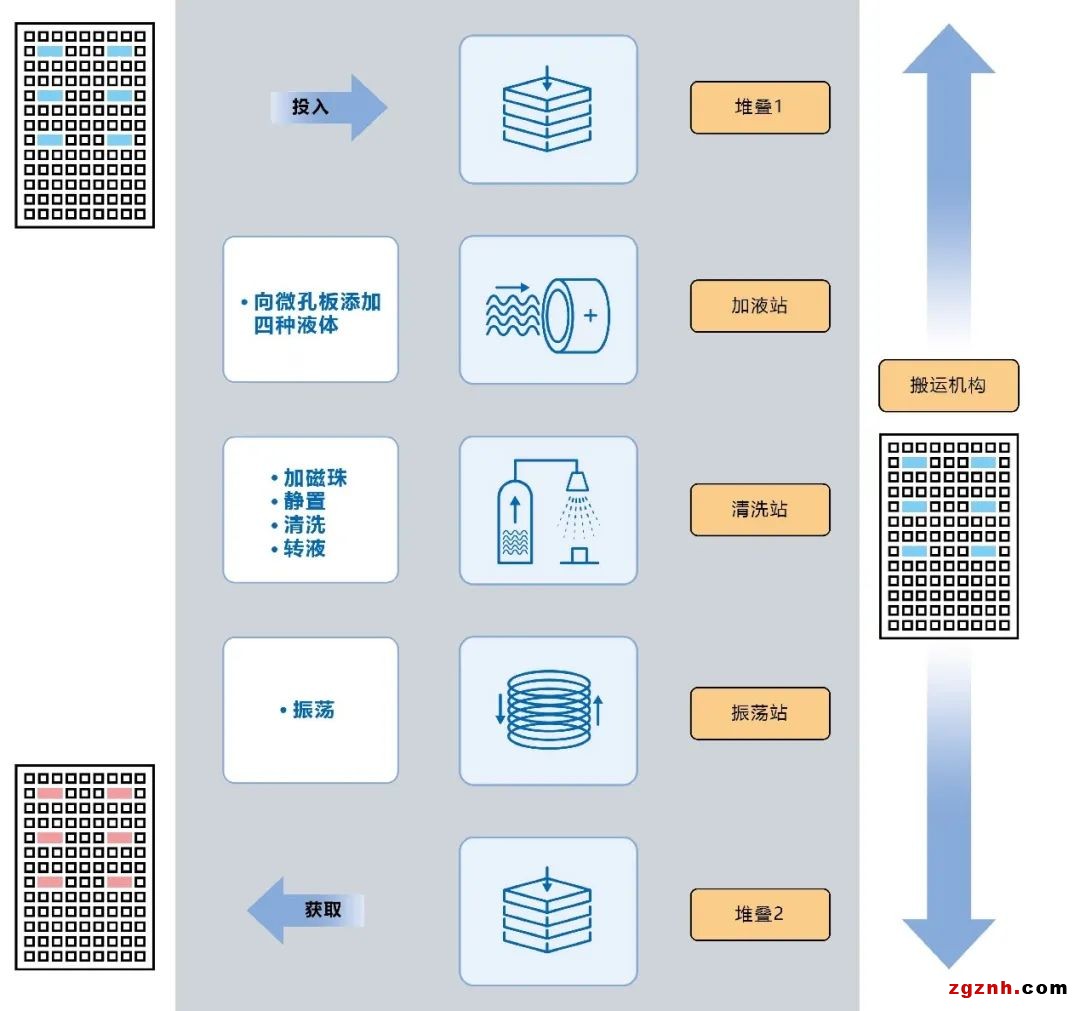
机器人需通过搬运机构,移动至各个工位进行取料/放料,受到高速移动或急停的惯性影响,易产生晃动,造成放料不准。
【解决方案】
1 采用可柔性控制的协作机器人
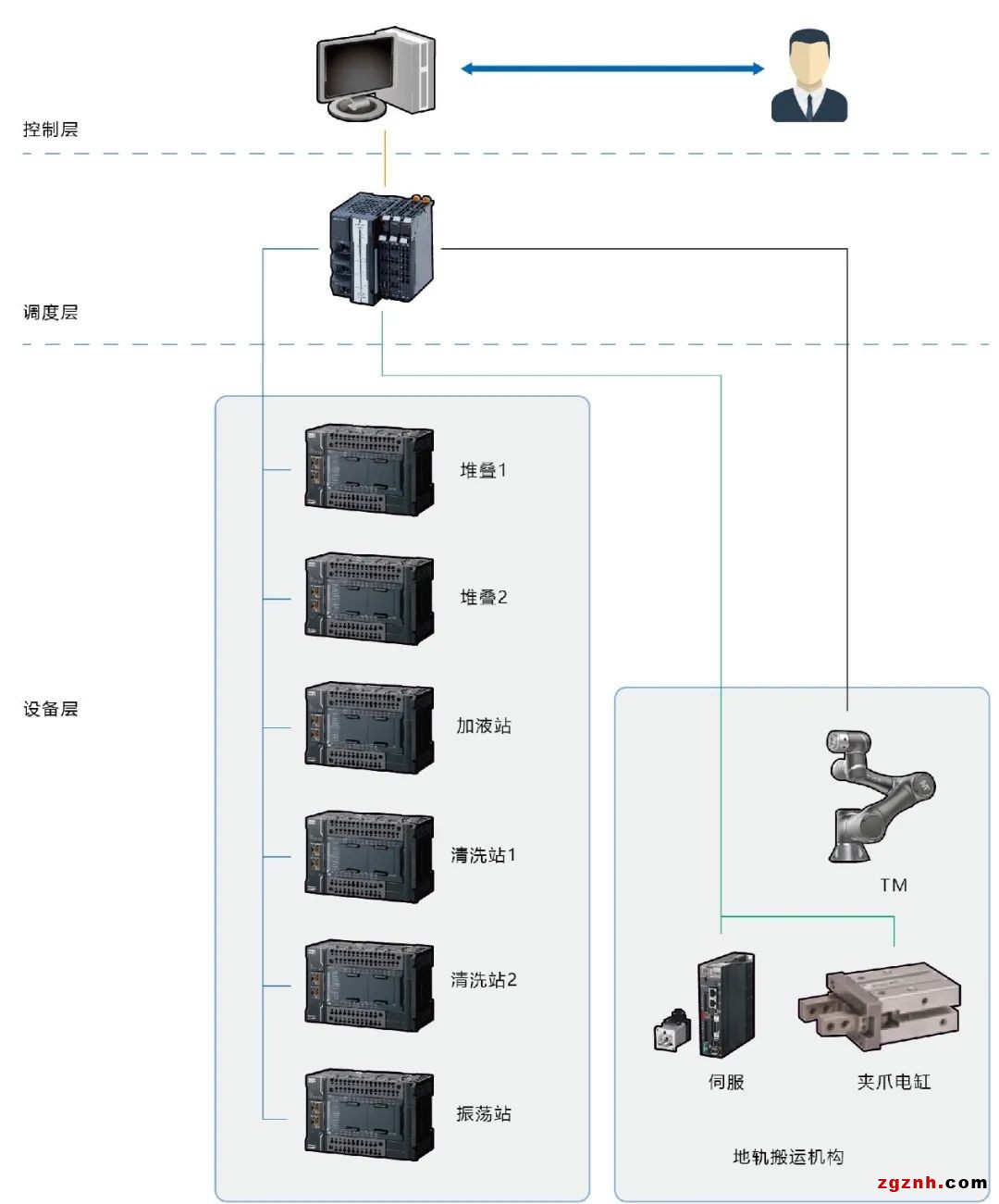
首先,由编程更为灵活的机械自动化控制器NX1系列作为主站,TM协作机器人作为从站。
其次,确认Socket TCP的通讯协议,以及通讯连接方式。然后,再确认TM协作机器人的数据接收方式,其中Listen Node能对应四种命令,实现更加柔性的应用。
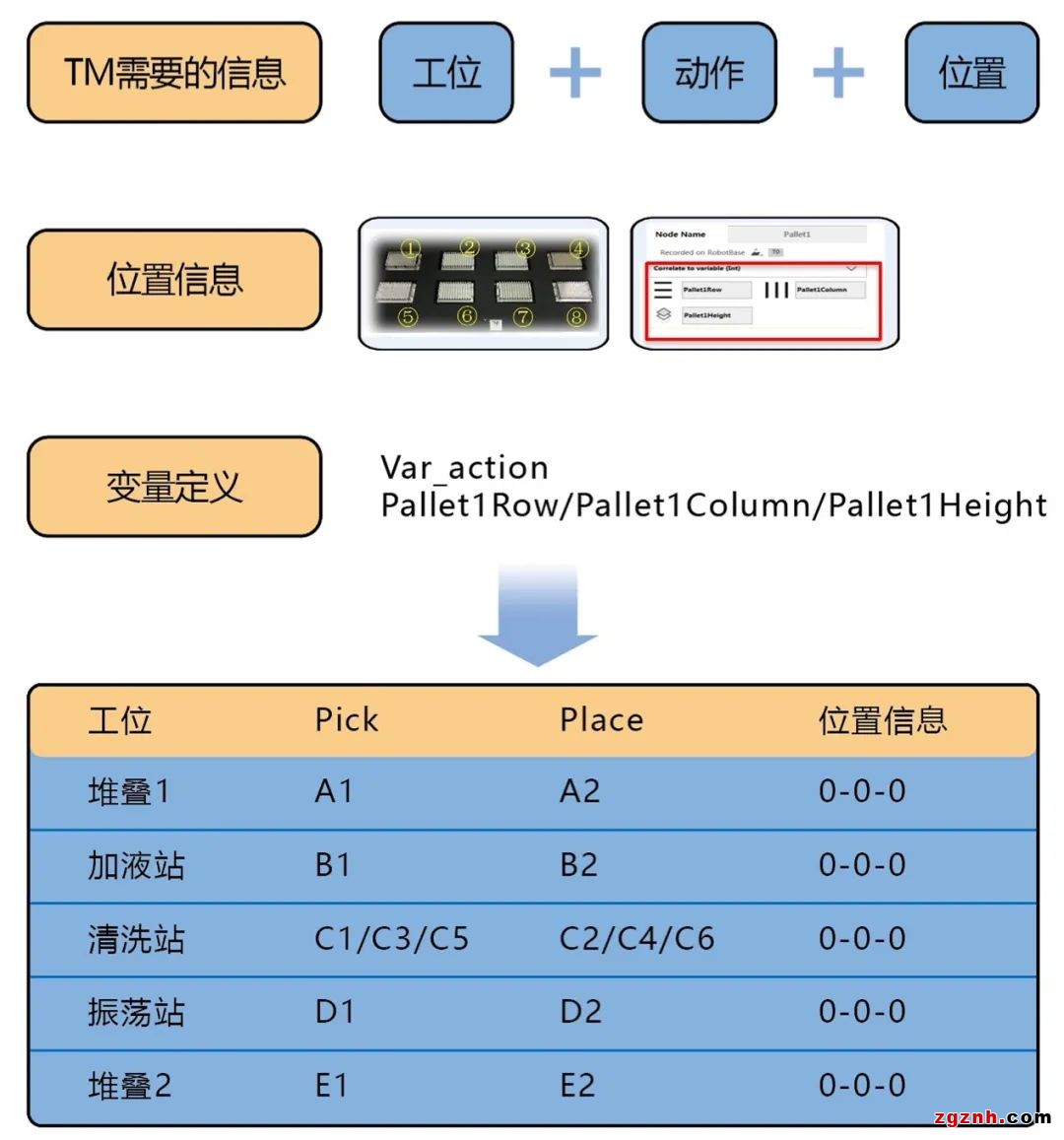
最后通过获取到的工位、动作、位置等信息,建立整体的控制流程与程序框架,最终实现TM协作机器人的柔性流程控制。
2 独特的Landmark功能,实现准确定位
传统的应用,若点位纪录于机器人坐标系上,此时手臂与对象相对关系改变时,则所有点位均需要重新示教。而通过欧姆龙协作机器人TM系列特有的【LandMark】标签,能够轻松建立视觉坐标,在此坐标系下设定点位。
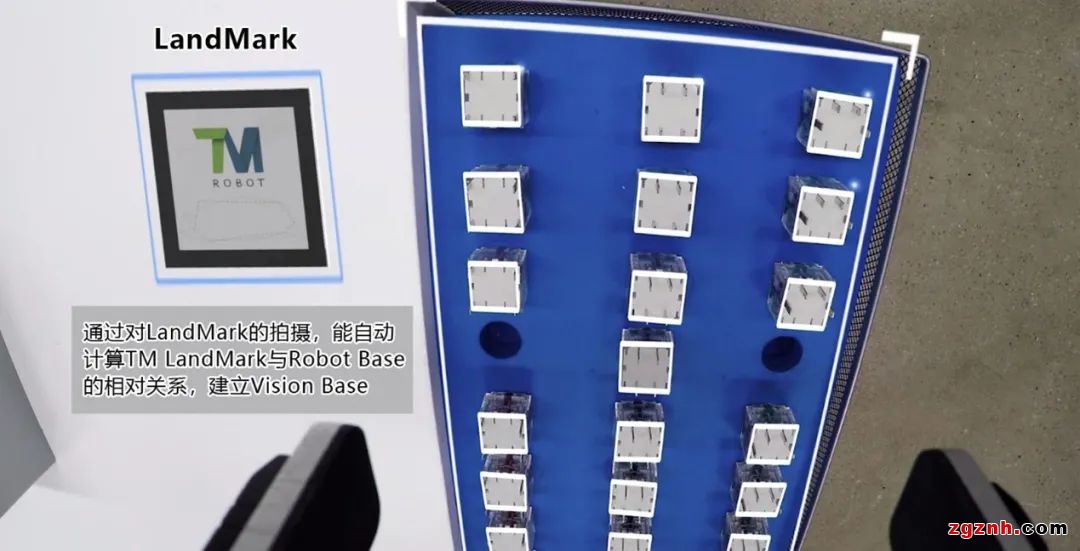
此时若手臂的关系改变时,通过拍摄LandMark能自动计算目标点位偏差并补偿,实现准确定位。

控制系统
实现价值
1、 效率:设备整体检测效率达到4PCS/小时要求。
2、 安全:机器人全面取代人工检测,降低感染以及人工干预的污染影响。
【经营层】
■ 新型无人化医疗设备,将自动化技术应用于医疗检测的发展,降低人工介入可能造成的感染风险,为防止疫情大范围传染,加强医护人员、检测人员的安全做出了重大贡献。
【管理层】
■ 协作机器人TM系列自带500万像素的视觉系统,无需再额外配置,节省成本。
■ 机器人全面取代人工检测,稳定无差错,减少人件费,并且杜绝了人工干预产生的污染或感染风险。
【工程师层】
■ 协作机器人TM系列自带500万像素的视觉系统,无需单独调试视觉,编程简单快捷。
■ 欧姆龙提供从机器人、控制器、运动控制到伺服系统的整体解决方案,通讯更稳定,维护更简便。
 粤公网安备 44030702001206号
粤公网安备 44030702001206号