
伴随国务院提出碳达峰、碳中和各项工作指示,各级产业结构和能源结构升级一触即发,工业4.0进程再次提速,工厂自动化装备升级改造如离弦之箭,成燎原之势。
而SICK作为工厂自动化的好搭档,给客户提供优异的视觉产品及多方位的传感器解决方案,被广泛应用于全球工厂的各个工位,尤其在金属制造及相关基础产业,我们的视觉产品能够在恶劣的环境下高效稳定运行,得到客户们的深度认可。
此次,SICK给大家分享金属制造及相关行业的3D视觉应用案例。
应用案例目录 ·
以下是SICK 3D在金属制造及相关行业的应用目录:
● 原材料剥离前进行视觉定级
● 钢坯种类形状识别防错
● 耐火砖尺寸检测
● 钢材成品全尺寸检测
● 钢包口定位引导
● 工程机械制造过程中的定位引导
1 原材料从极板剥离前进行视觉定级
应用描述
铜材料在火法提炼后通过电解附着在阳极板上面,然后由自动剥铜机将其从极板剥离。该视觉系统在材料从极板剥离前进行3D检测,统计铜的生产良率,检测极板上铜材料凸点高度大小,凸点>1.5mm属于NG。铜板尺寸为1050mm*1029mm*20mm,使用SICK Ranger3 3D相机灵活搭建的视觉检测系统,只需要一个相机即可在2s内完成检测,有效实现工艺透明化,将电解效果可视化,有助于对前工序工艺量化反馈。
应用难点
● 空间狭小,视野范围大,节拍较快;
● 现场环境光线影响,对3D相机成像效果要求高。
应用选型
● SICK Ranger3,高速高精度,X像素数高达2560,扫描帧率高达46kHz(ROI模式:128rows);
● Ranger3可根据板产品尺寸及复杂工作环境,灵活匹配不同镜头、光源,设计更适合的视野,取更优方案。
应用图示

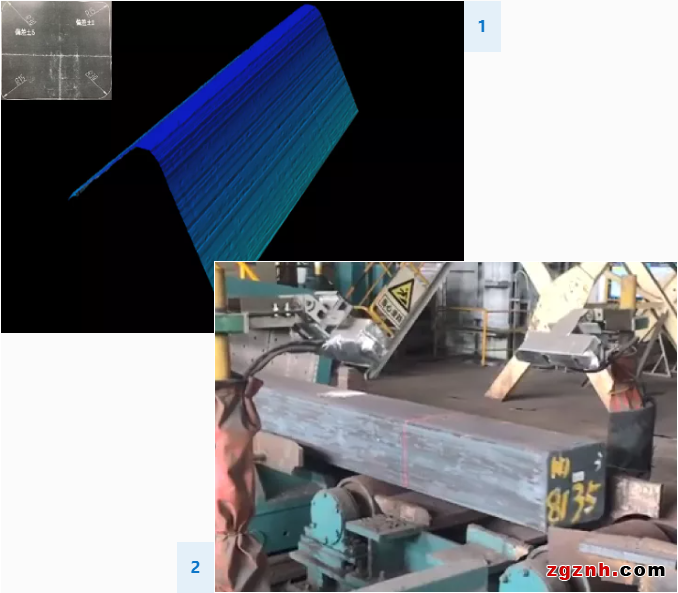
2 钢坯种类形状识别防错
应用描述
钢坯在入炉淬火等工艺前,需要根据钢坯横截面上顶角处的半径判断是否需要翻转。每一种钢坯的4个顶角处只会有R15±2、R30±5两种尺寸。使用SICK 3D 相机完美解决钢胚入炉料型难以区分的问题,避免混料,而且替代了人工,实现产线全检,并且自动将钢胚尺寸、倒角尺寸上传到数据库中存档。
应用难点
● 产品种类多,视野范围较大,节拍较快
● 现场存在高温,高粉尘的情况,对3D相机成像效果要求高
应用选型
● SICK TriSpector1060,一体式智能3D相机,出厂预标定,方便易用;
● 内置定制激光,应对现场合适复杂环境,获得优异图像。
应用图示
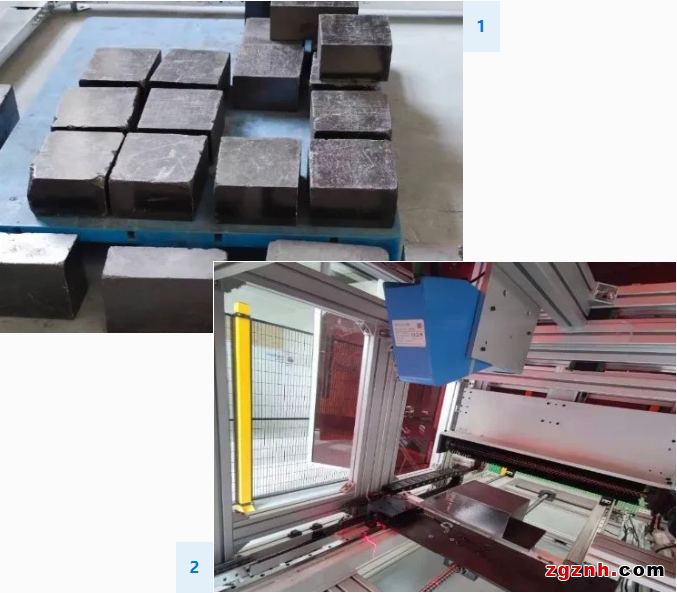
3 耐火砖尺寸检测
应用描述
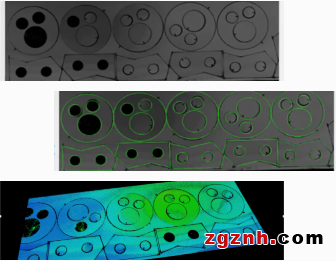
耐火砖简称火砖,是用耐火黏土或其他耐火原料烧制成的耐火材料,呈淡黄色或带褐色,能耐1,580℃—1,770℃的高温,主要用于砌冶炼炉。该应用使用SICK 3D相机检测火砖的外观及尺寸,实现自动化设备升级。
应用难点
● 客户产品种类多;
● 现场存在高粉尘的情况,对3D相机成像效果要求高。
应用选型
● SICK RulerXR系列,高速高精度,X像素数高达2560,扫描帧率高达46kHz(ROI模式:128rows);
● 一体式相机方便易用。
应用图示
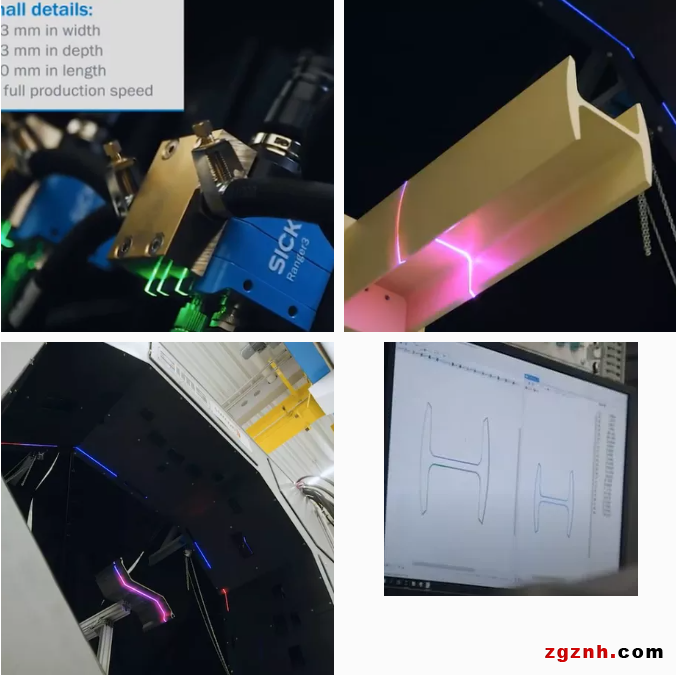
4 钢材成品全尺寸检测
应用描述
钢材成型出厂前,需要对型材进行全尺寸轮廓检测。使用SICK 3D 相机更好地解决生产线上高速检测、多种类柔性线兼容问题,而且替代了人工,实现产线全检,并且自动将型材尺寸上传到数据库中存档。该视觉系统搭载的Ranger3相机可在4m/s的高速度速度底下实现:
0.3mm*1mm*0.3mm的检测精度。
应用难点
● 产品种类多,形状复杂;
● 视野范围较大,节拍极快;
● 现场存在高粉尘的情况,对3D相机成像效果要求高。
应用选型
● SICK Ranger3-60,高速高精度,X像素数高达2560,扫描帧率高达46kHz(ROI模式:128rows);
● Ranger3可根据型材的尺寸,灵活匹配不同镜头、光源,设计更适合的视野,取更优方案。
应用图示
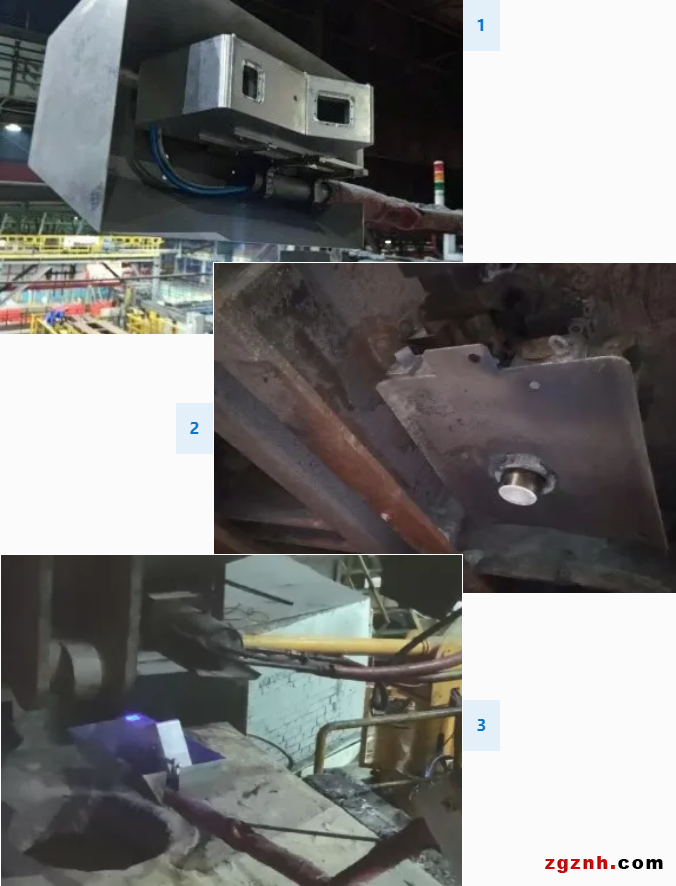
5 钢包口定位引导
应用描述
在钢铁精炼工艺过程中,需要把一般炼钢炉中初炼的钢水移到另一个容器中(主要是钢水包)进行精炼的过程,也叫“二次炼钢或炉外精炼”。该应用使用SICK 3D相机引导钢包转炉。
应用难点
● 现场环境光线影响,对3D相机成像效果要求高;
● 现场高温工作状态,对3D相机成像稳定性有极高要求。
应用选型
● SICK Ranger3,高速高精度,X像素数高达2560,扫描帧率高达46kHz(ROI模式:128rows);
● Ranger3可根据被测物的尺寸,灵活匹配不同镜头、光源,设计更适合的视野,取更优方案。
应用图示
6 工程机械制造过程中的定位引导
应用描述
工程机械结构件通常由切割板材件和铸钢件拼焊而成。
在钢材钣金切割分拣过程中,采用SICK分体3D相机,自由灵活搭配激光镜头,可实现500-3000mm不同大小钣金的定位引导。
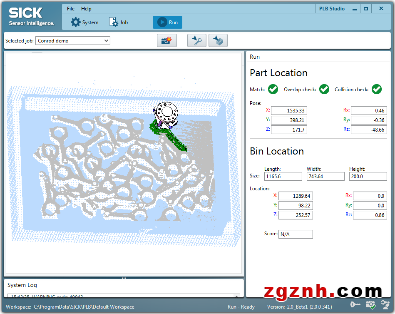
在销轴及阀块加工等料框上料过程中,使用SICK产品PLB视觉系统配合机械手进行定位引导。
在焊接工艺过程中,采用SICK分体3D相机进行粗定位,再使用PLR视觉系统精定位,进行焊接定位引导。
应用难点
● 产品种类多、视野大、精度要求高。
● 现场环境光线影响,对3D相机成像效果要求高。
● 焊接工位电磁干扰较强,电气条件苛刻。
应用选型
● SICK Ranger3/PLB/PLR视觉定位系统;
● Ranger3可根据型材的尺寸,设计更适合的视野,取更优方案。
应用图示

 粤公网安备 44030702001206号
粤公网安备 44030702001206号