
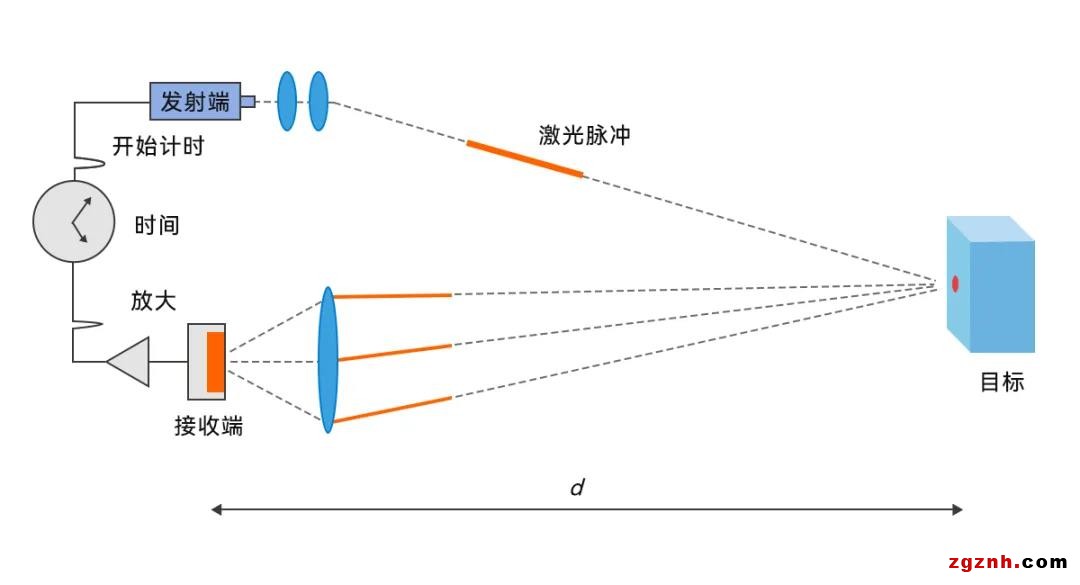
激光雷达工作原理(TOF)
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。运用的是时间飞行(TOF)原理,LIDAR系统包括一个单束窄带激光器和一个接收系统。其工作原理是向目标发射一束光脉冲,然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,接收器准确地测量光脉冲从发射到被反射回的传播时间。通过距离与速度和时间测关系,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
我们在这一期的
解决方案 | 狭小空间安全防护案例—AS系列激光雷达
给大家介绍了激光雷达的安全防护功能,除此之外,AS系列还凭借优异性能及高价性比目前已经在AGV广泛应用,今天来为大家分享一下它在AGV中的具体应用案例。
服务机器人自由导航
机器人的自主导航功能,要求在已知环境下自动定位与导航,按照设定的路线自主行驶,具备躲避行人、路障的能力。明治AS系列激光雷达搭载SLAM算法,无需其他定位设施,形式路径灵活多变,能够适应多种现场环境,根据在已建好的地图中行驶,边行驶边记忆,学习新的路径,存储已学习的路径,在相同场景下,智能选出最佳路径完成工作任务。

机 器 人 巡 检
在室外巡检机器人领域,明治AS-100C应用在室外巡检机器人上,依靠产品自身的远距离、高精度、抗强光干扰(80000Lux)、雨雪雾尘下稳定使用等特点,通过多传感器融合算法,精准点云数据采集,提升了SLAM的有效建图能力,对机器人行进轨迹进行合理的规划;同时不断进行实时数据(远距离可达100米)的更新反馈,帮助机器人有效、准确定位,通过自我学习、修正、调整路线,扫描频率20Hz,分辨率0.05℃,毫米级测量精度,航向误差小于1°,可完成高难度的巡检任务。

大型机械设备运行的区域避障
AS系列激光雷达检测距离远(0-100m),因此在大型设备中尤为适用,可起到防撞的作用,可同时进行16个障碍物的检测。
在机械动态运作中,雷达监测到一定范围内有异物出现,可对机械发出减速甚至停止的指令,从而有效避免机器与其他物体发生碰撞。

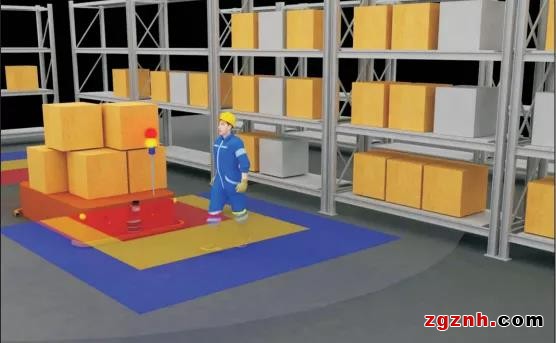
无 人 搬 运 车
作为自动化运输搬运的重要工具,近年来越来越广泛地被选择。很多制造和仓储物流都考虑使用AGV小车,明治AS系列激光雷达搭载SLAM算法运用在AGV物流小车上,可不用预先铺设任何轨道,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,更好地实现多AGV小车的协调控制。
产品规格

目前,明治传感器的激光雷达已经与多个业内知名客户达成稳定合作,接受业内广泛检验,未来明治将不断提升产品的一致性,不断研发升级,追求更高检测精度、更长检测距离、更广检测范围,让激光避障雷达拥有更高的性能。

 粤公网安备 44030702001206号
粤公网安备 44030702001206号